Waypoint Inertial Explorer
ソフトウェア
GNSSと慣性航法を組み合わせるとき、非常にロバスト性にとんだ正確な位置、速度および高度解を求める事ができます。しかしながら、リアルタイムの場合衛星の視界などが遮られるなどの制約が多く、また多くのアプリケーションにおいて、解の決定はリアルタイムである必要はありません。このような場合、後処理による解析でGNSS/INSのポジション解は飛躍的に良くなります。
後処理解析において、GNSSとINSのRaw Dataの収集が必要です。そして、データはローカル基地局によるディファレンシャル・プロセシングや、フォワード、リバース(同時)、Backwardスムージング機能、精密な衛星時計や軌道の情報を利用する事で、リアルタイムの場合よりもさらに高精度に位置を求めることができます。
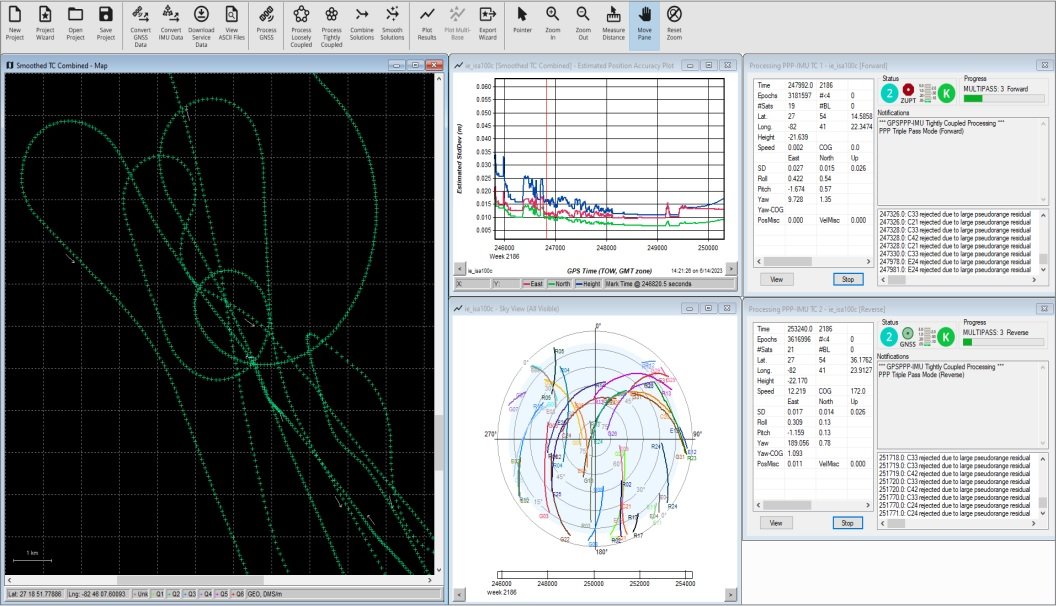
Inertial Explorerは、パワフルで、かつ高度な設定が可能な解析エンジンにより、使用しうるすべてのGNSS/INSデータを使用することで、もっともベストなGNSS精度を可能にします。Tightly-coupled GNSS/INS解析では、GNSS衛星の位置の計算ができない場合や2つの衛星しか取得できない場合などのGNSSの観測データを使用することができます。解の精度に関しては、マルチプル・クオリティ・コントロール機能により、クオリティのレベルが表示されます。使用できる受信機のフォーマットは多く、また、RINEXデータに対応しております。基準局データ・ダウンロード・ユーティリティを使用することで、多くの公共の基地局サービス(日本においては国土地理院の電子基準点サービス)などを使用することで、自前での基地局設置が不要になります。
Inertial Explorerは、NovAtel社のSPANシステムから簡単にデータのインポートが出来ます。また、それ以外の多くの受信機、IMUよりデータのインポートが可能です。また、解析後、多くの出力フォーマットでのデータの出力が可能です。
DOWNLOAD
製品情報
特長
・"Loosely" and "Tightly" coupled GNSS/INS解析
・NovAtelのSPANシリーズと組み合わせで容易なインテグレーションが可能
・多くのGNSS受信機、IMUに対応可能